以下(xià)轉載文章(zhāng)授權來源於 微波雜誌
作者: Tero Kiuru 和(hé) Henrik Forstén,VTT Technical Research Centre of Finland Ltd.,Espoo,芬蘭
雷達使用(yòng)反射的(de)無線電波來確定物(wù)體的(de)距離、角度或速度。這些探測系統曾經是航空航太和(hé)國防工業的(de)專屬領域,現在在消費領域也(yě)越來越受歡迎,最引人(rén)注目的(de)是用(yòng)於自我調整巡航控制和(hé)自動駕駛輔助系統的(de)汽車雷達應用(yòng)。1 現代的(de)頻率調製連續波 (FMCW) 系統中的(de)類比和(hé)射頻硬體比原來的(de)脈衝多(duō)普勒雷達複雜得(de)多(duō),而且商業應用(yòng)是可(kě)能的(de),部分(fēn)原因是大(dà)批量的(de)半導體工藝,如 SiGe 和(hé) CMOS 技術,這使得(de)大(dà)規模商業應用(yòng)的(de)系統具有高(gāo)成本效益。
本文介紹了(le)一種用(yòng)於商業雷達應用(yòng)的(de) 60 GHz FMCW、頻分(fēn)複用(yòng) (FDM)、MIMO 雷達系統。2 這種獨特的(de)結構使發射 (Tx) 和(hé)接收 (Rx) 通(tōng)道的(de)總數可(kě)以通(tōng)過系統中的(de)積體電路數量來擴展,同時仍然保持通(tōng)道之間的(de)相位一緻性。這種方法提供了(le)高(gāo)幀率的(de)測量、出色的(de)相位穩定性和(hé)大(dà)視場 (FoV)。雷達結構和(hé)積體電路的(de)設計使該系統可(kě)以擴展到更大(dà)的(de)雷達系統。
本文中的(de)雷達系統的(de)預期用(yòng)途是在雷達本身可(kě)能移動時對附近的(de)移動物(wù)體進行短距離、高(gāo)解析度的(de)探測,意在捕捉人(rén)流量、無人(rén)機和(hé)其他(tā)自主系統。此外,該系統可(kě)以支援同時進行定位和(hé)測繪、物(wù)體探測 (如汽車) 和(hé)醫療應用(yòng)的(de)遠端多(duō)目標生命體征測量。FDM 被確定為滿足高(gāo)解析度要求的(de)最佳選擇,因為碼分(fēn)多(duō)工太複雜,而對快(kuài)速移動物(wù)體的(de)精確跟蹤要求使時分(fēn)多(duō)工不切實際。此外,FDM 允許精確的(de)相位測量,這支持醫療應用(yòng),如通(tōng)過檢測胸部的(de)微小運動來遠端監測心跳和(hé)呼吸速率。
60 GHz FMCW MIMO 雷達
對雷達系統的(de)要求包括大(dà)於 200 赫茲的(de)快(kuài)速成像、小於 5 釐米的(de)距離解析度、多(duō)目標採集、移動目標能力和(hé)對微動的(de)高(gāo)靈敏度——所有這些都在一個小的(de)、輕的(de)、低成本的(de)空間裡。該系統的(de)規格為:
 |
1.5 度角解析度,8 通(tōng)道 Tx – 8 通(tōng)道 Rx MIMO |
|---|---|
|
3 至 5 釐米的(de)距離解析度 |
|
160 度的(de)水(shuǐ)準焦距 |
|
25 度的(de)仰視焦距 |
該系統對靜止的(de)人(rén)類大(dà)小的(de)物(wù)體提供 20 至 25 米的(de)最大(dà)探測距離。應用(yòng)背景減法,這一距離對移動目標增加到 60 米。該系統還支援同時探測多(duō)個移動物(wù)體,而無需物(wù)理(lǐ)掃描天線。還可(kě)提供具有 160 x 160 度視場的(de)三維系統。
雖然雷達系統提供了(le)許多(duō)潛在的(de)使用(yòng)模式,但多(duō)人(rén)生命體征提取能力對未來的(de)應用(yòng)很有意義。對於資料分(fēn)析,雷達技術的(de)速度是關鍵,因為它在不支援視覺圖形的(de)情況下(xià)可(kě)以以每秒 200 幀 (FPS) 的(de)速度運行,而在有視覺化(huà)的(de)要求下(xià)可(kě)以達到 50 到 100 幀。
FMCW 操作
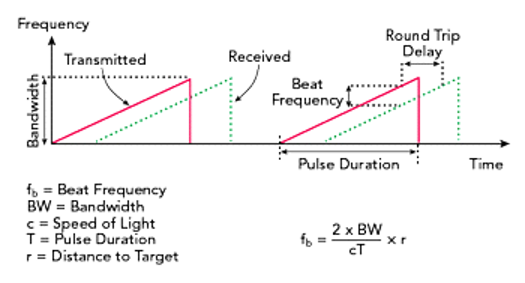
圖 1: FMCW 鋸齒形波形。
傳統的(de)脈衝雷達透過發射一個短脈衝並觀察返回的(de)目標回波的(de)飛行時間來探測目標的(de)距離。這就要求雷達具有較高(gāo)的(de)暫態發射功率,並常常導緻設備具有龐大(dà)、昂貴的(de)物(wù)理(lǐ)結構。FMCW 雷達透過發射一個用(yòng)低頻波形調製的(de)連續微波信號,如週期為 T 的(de)鋸齒函數,其持續時間遠遠大(dà)於回波的(de)返回時間,用(yòng)更小的(de)暫態發射功率和(hé)尺寸達到類似的(de)效果 (見圖 1) 。
與脈衝雷達不同,FMCW 系統同時發射和(hé)接收,消除了(le)脈衝雷達中的(de)接收器在發射過程中被關閉時出現的(de)盲區。FMCW 系統可(kě)以探測到離雷達非常近的(de)物(wù)體的(de)反射信號,使其可(kě)以測量到幾釐米的(de)距離。該系統實現了(le)出色的(de)測距解析度,它與頻寬的(de)倒數成正比,即 Δx=c/(2Δf),並且在狹窄的(de)中頻 (IF) 頻寬下(xià)實現了(le)高(gāo)信噪比。
圖 2 是在 Cadence® AWR Design Environment®,特別是 AWR® Visual System Simulator™ (VSS) 系統設計軟體中實現的(de)系統簡化(huà)圖。信號源被劃分(fēn)在 Tx 和(hé) Rx 兩端。Tx 功率放大(dà)器 (PA) 和(hé) Rx 低雜訊放大(dà)器 (LNA) 鏈路的(de)細節——圖中沒有顯示——可(kě)以進一步開發。Tx 和(hé) Rx 的(de)信號路徑必須很好地隔離才能正常運行,這影(yǐng)響了(le)某些設計方面,並限制了(le) Tx 功率。否則,來自 Tx 端的(de)功率將洩漏到 Rx 電路中,可(kě)能會使 LNA 和(hé) / 或下(xià)變頻混頻器飽和(hé)。
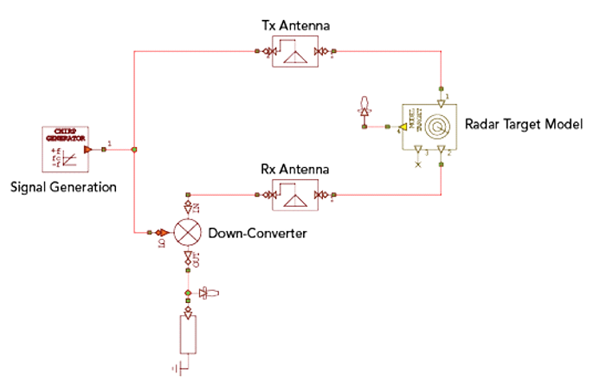
圖 2: VSS 中的(de)簡化(huà) FMCW 雷達。PA、LNA 和(hé)單個 MIMO 通(tōng)道未顯示。
模擬圖說明(míng)瞭信號在 Tx 和(hé) Rx 天線之間通(tōng)過 VSS 雷達目標模型進行輻射,該模型包括 RCS、距離、速度和(hé)環境條件等屬性。混頻器將對目標反射的(de)信號進行下(xià)變頻,使用(yòng)壓控振盪器 (VCO) 的(de)掃頻作為本地振盪器。取這兩個信號之差,形成一個與目標距離成正比的(de)節拍(pāi)信號。這個中頻被送入一個模數轉換器 (ADC) 進行信號處理(lǐ),該轉換器使用(yòng)快(kuài)速傅裡葉變換演算(suàn)法提取目標距離。使用(yòng)多(duō)根天線,傅裡葉變換還支援數位波束成形,以產生被探測物(wù)體的(de)二維圖像。
為什(shén)麼是 FMCW MIMO?
開發人(rén)員選擇了(le)一個 FDM MIMO 架構來解決快(kuài)速成像和(hé)高(gāo)解析度的(de)多(duō)個目標的(de)技術要求。使用(yòng) MIMO,物(wù)理(lǐ)單元的(de)數量可(kě)以大(dà)大(dà)減少。對於具有 Nt 個 Tx 元件和(hé) Nr 個 Rx 元件的(de) MIMO 雷達,從 Tx 陣列到 Rx 陣列有 Nt x Nr 個不同的(de)傳播通(tōng)道。因此,隻用(yòng) 8 個 Rx 和(hé) 8 個 Tx 通(tōng)道就可(kě)以合成 64 個虛擬通(tōng)道,這大(dà)大(dà)降低了(le)系統的(de)複雜性、規模和(hé)成本。
FDM 從每個發射器同時發射不重疊的(de)頻率,因此不同的(de)發射器信號可(kě)以在接收器處被分(fēn)離。3 在本設計中,頻率掃描或線性調頻是在 Tx / Rx 通(tōng)道外使用(yòng)一個 10GHz 的(de)鎖相環 (PLL) 信號發生器產生的(de),它為一個 6 倍的(de)頻率乘法器饋送信號。直接數位合成器產生低頻、同相和(hé)正交 (I/Q) 調製信號,每個單獨的(de) Tx 通(tōng)道的(de)頻率偏移為 1MHz。外部 ADC 將下(xià)變頻接收信號的(de)中頻信號數位化(huà)。
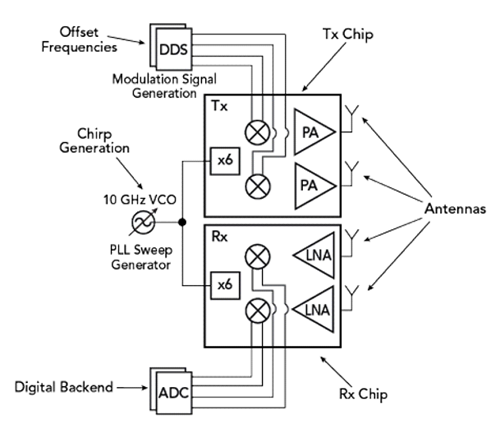
圖 3: 具有兩個 Rx 和(hé)兩個 Tx 通(tōng)道的(de)概念性系統。
由於 FDM MIMO 天線同時發射,所有的(de) Rx 通(tōng)道都將收到被恒定頻率偏移隔開的(de)所有 Tx 信號。解調器使用(yòng)原始線性調頻頻率作為本地振盪器 (LO) ,向下(xià)轉換含有頻率偏移的(de)信號,這是由於信號從目標上反射的(de)延遲造成的(de)。Tx 通(tōng)道在數位後端被分(fēn)離。雖然這種方法可(kě)以通(tōng)過同時測量所有的(de) MIMO 通(tōng)道來處理(lǐ)移動目標,但由於中頻信號頻寬較寬,它需要在每個 Tx 上有調製器來轉移發射頻率和(hé)更快(kuài)的(de) ADC。圖 3 是一個概念性的(de)系統框圖,顯示了(le)兩個 Rx 和(hé)兩個 Tx 通(tōng)道。
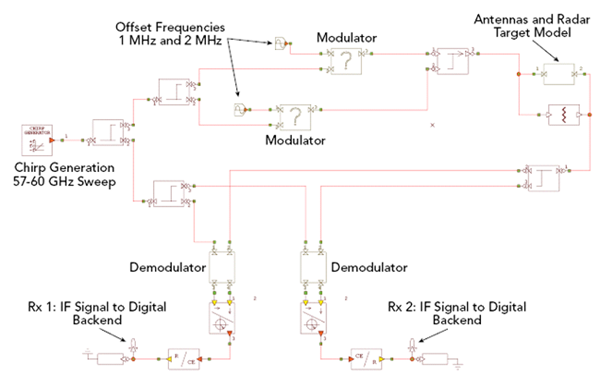
圖 4: FMCW MIMO 雷達框圖。
系統設計、驗證
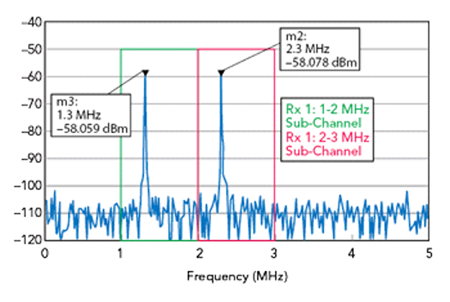
圖 5: 模擬的(de)下(xià)變頻信號。
VSS 軟體被用(yòng)來研究 MIMO 雷達的(de)主要系統級方面。該軟體提供了(le)信號源、LNA、混頻器、PA、倍頻器、天線和(hé)雷達目標的(de)框圖表示 (見圖4) ,使設計人(rén)員能夠調整和(hé)優化(huà)關鍵參數,並隨著更多(duō)電路級細節的(de)加入而納入雷達系統的(de)實際操作。VSS 軟體類比了(le)兩個 Rx 下(xià)變頻器通(tōng)道的(de)中頻輸出。使用(yòng)圖 1 中的(de)公式,在 57 至 60GHz 的(de) 3GHz 頻寬 (BW) 的(de)頻率掃描中,差拍(pāi)頻率 (fb) 為 300kHz,脈衝持續時間 (T) 為 1ms,目標距離 (r) 為 15m。類比 Tx 1 的(de) Rx下(xià)變頻信號 (圖1中的(de)綠色線) 為 1 + 0.3 = 1.3 MHz,Tx 2 的(de) Rx 下(xià)變頻信號 (圖 1 中的(de)紅色線) 為 2 + 0.3 = 2.3 MHz (見圖 5) 。
RFIC 設計和(hé)分(fēn)析
Tx 和(hé) Rx 射頻積體電路是雷達系統的(de)核心。每個都在非常小的(de)區域內包含四個通(tōng)道 (見圖 6) ,另外的(de) IC 可(kě)以被添加到系統中以增加通(tōng)道的(de)數量。一個 RFIC 支援多(duō)個通(tōng)道是很有利的(de),這樣可(kě)以降低裝配的(de)複雜性,並支援擴展一個有大(dà)量通(tōng)道的(de)系統。獨立的(de) Tx 和(hé) Rx IC 可(kě)以實現獨立的(de) Tx / Rx 擴展,降低 Tx 和(hé) Rx 之間的(de)洩漏,並支援更靠近饋電結構,以減少印刷電路闆 (PCB) 的(de)損耗。一個單一的(de)外部 VCO 和(hé) PLL 提供了(le)分(fēn)配給所有 RFIC 的(de) LO 信號,從而產生了(le)出色的(de)相位雜訊相關性。一個 10GHz 的(de)外部信號用(yòng)於在 PCB 上佈線,因為在一個有許多(duō)通(tōng)道的(de)系統中佈線一個 60GHz 的(de) LO 會很困難。這個 9.75 至 10.25 GHz 的(de)線性調頻被乘以 RFIC 的(de)工作頻率。
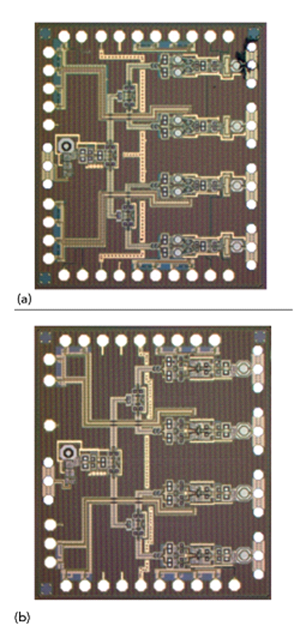
圖 6: Tx IC (a) 和(hé) Rx IC (b) ,每個都有四個通(tōng)道。
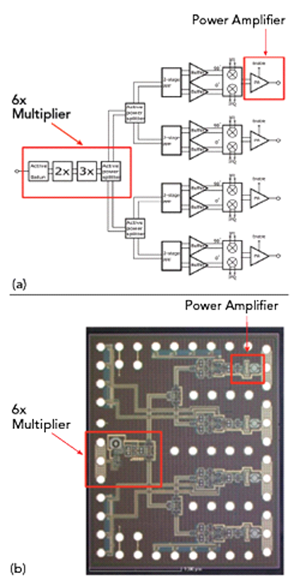
圖 7: 四通(tōng)道 Tx 框圖 (a) 和(hé) IC 佈局 (b) 。
AWR Microwave Office 電路設計軟體與 AWR AXIEM® 電磁 (EM) 模擬器一起使用(yòng),利用(yòng) AWR 軟體可(kě)用(yòng)的(de) IHP SG13S SiGe 工藝設計套件 (PDK) 從電晶體層面設計 Tx 和(hé) Rx 積體電路。用(yòng)於毫米波應用(yòng)的(de) SG13S 130 納米 SiGe 雙極 CMOS 工藝具有高(gāo)速 HBT,fT = 240 GHz,fmax = 330 GHz。
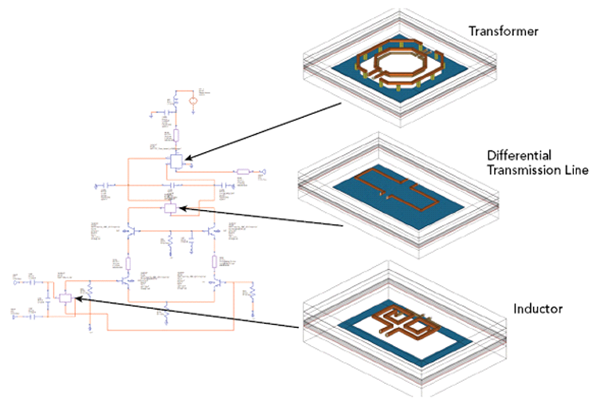
圖 8: 帶有變壓器、差分(fēn)傳輸線和(hé)電感器佈局的(de) PA 電路圖。
圖 7 顯示了(le)四通(tōng)道 Tx 射頻積體電路和(hé)實際 Tx 晶片的(de)框圖。有源巴倫、6倍諧波乘法器鏈路 (2 倍和(hé) 3 倍乘法器級聯) 和(hé)一個元件的(de)功率放大(dà)器被突出顯示,以顯示它們在 RFIC 的(de)位置。三個有源功率分(fēn)配器將信號分(fēn)成對稱的(de)四路,每路供給一個兩級多(duō)相濾波器,產生 90 度相移的(de) I 和(hé) Q LO 信號。功率分(fēn)配器之後是緩衝放大(dà)器、I/Q 調製器和(hé)功率放大(dà)器。圖 8 顯示了(le) PA 的(de)電路圖,它是使用(yòng) Microwave Office 的(de)代工廠 PDK 的(de)元件開發的(de),突出了(le)變壓器、差分(fēn)傳輸線和(hé)電感器。與波長相比,這些無源結構的(de)電容量很大(dà),需要使用(yòng) AXIEM 求解器進行電磁分(fēn)析和(hé)優化(huà)。在電路圖中,電磁元件被嵌入為子電路,以便與 Microwave Office 共同模擬。通(tōng)過包括電磁分(fēn)析與晶片級放大(dà)器的(de) PDK 模型相結合,在測量性能和(hé)模擬性能之間產生了(le)很好的(de)一緻性 (見圖 9) 。
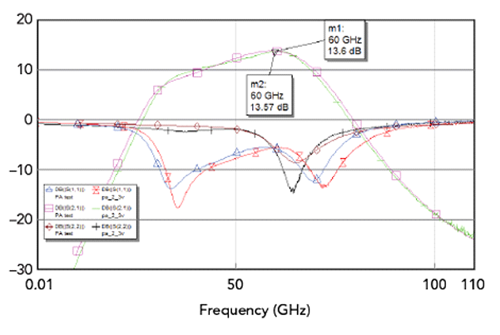
圖 9: 模擬與實測的(de) PA 增益,|S11| 和(hé) |S22|。
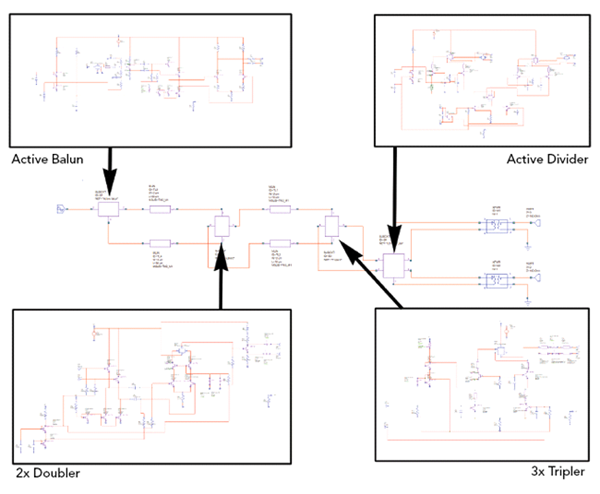
圖 10: 6 倍乘法器電路圖。
假設輸入頻率為 10GHz,偏壓為 2.4V,對輸出端的(de)有源巴倫、諧波乘法器鏈和(hé)有源功率分(fēn)配器 (見圖 10) 進行了(le)模擬。圖 11 所示的(de)模擬結果為乘法器的(de)運行提供了(le)有用(yòng)的(de)見解,使人(rén)們能夠瞭解所產生的(de)雜散信號的(de)功率水(shuǐ)準。從雷達設計的(de)角度來看,掌握這些資訊對抑制這些雜散信號是有益的(de),這就需要採取額外的(de)設計步驟來微調電路。
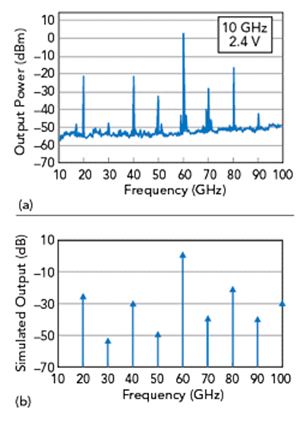
圖 11: 6 倍乘法器的(de)實測 (a) 和(hé)模擬 (b) 輸出。
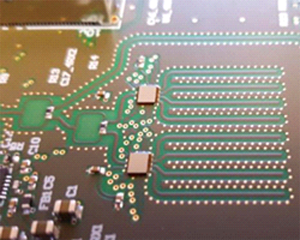
圖 12: 使用(yòng)兩個 Rx IC 的(de)八個 Rx 通(tōng)道的(de) PCB。
MIMO 雷達測量結果
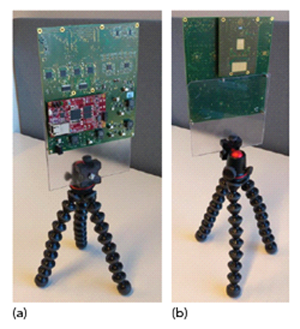
圖 13: 雷達系統 PCB 的(de)背面 (a) 和(hé)正面 (b) 視圖。
接收器的(de)射頻部分(fēn) (見圖 12) 顯示了(le)由安裝在 PCB 上的(de)兩個 Rx RFIC 倒裝片支持的(de)八個 Rx 通(tōng)道。高(gāo)速信號處理(lǐ)後端的(de)正面和(hé)背面,安裝在實驗室測試用(yòng)的(de)支架上,如圖 13 所示。接收器的(de)相位和(hé)振幅是用(yòng)單點目標測量來校準的(de)。相位和(hé)振幅的(de)修正係數是確定的(de),所以點目標測量提供了(le)一個正確角度的(de)點靶心圖表像。
二維多(duō)輸入多(duō)輸出雷達的(de)「人(rén)流」測量驗證了(le)它能以 100 到 200 FPS 的(de)速度同時探測到多(duō)個人(rén) (見圖 14) 。演示的(de)距離解析度為 3 至 5 釐米,角度解析度為 3.5 度。在圖像形成過程中,在測距方向上採用(yòng)了(le)漢明(míng)開窗(chuāng)函數,在方位角方向上採用(yòng)了(le) -25 dB 的(de)側葉水(shuǐ)準泰勒窗(chuāng)。泰勒開窗(chuāng)函數略微降低了(le)角度解析度,但降低了(le)側波水(shuǐ)準,使圖像能夠以更高(gāo)的(de)動態範圍形成。在生成的(de)圖像中,目標被很好地分(fēn)開。
精確的(de)相位測量在測量目標的(de)非常小的(de)運動時非常有用(yòng)——例如,利用(yòng)胸部的(de)位移來確定人(rén)的(de)心跳和(hé)呼吸頻率。頻率複用(yòng)比時間複用(yòng)的(de)測量有優勢,因為所有的(de)通(tōng)道都是在同一時間測量。這在雷達多(duō)人(rén)心率變異性 (HRV) 提取中可(kě)以看到,如圖 15 所示。可(kě)以從雷達信號中觀察到生命體征,如心率、心率變化(huà)和(hé)呼吸。
結論
本文描述了(le)一種用(yòng)於商業應用(yòng)的(de)新型 60 GHz MIMO FMCW FDM 雷達的(de)設計。該系統提供了(le)高(gāo)幀率的(de)測量、出色的(de)相位穩定性和(hé)大(dà)視場。獨特的(de)結構和(hé) RFIC 的(de)設計使該系統可(kě)以擴展到更大(dà)的(de)雷達,同時保持各通(tōng)道之間的(de)相位一緻性。二維和(hé)三維成像系統已被展示,據作者所知,這是第一個三維成像、毫米波、頻分(fēn) MIMO 系統。
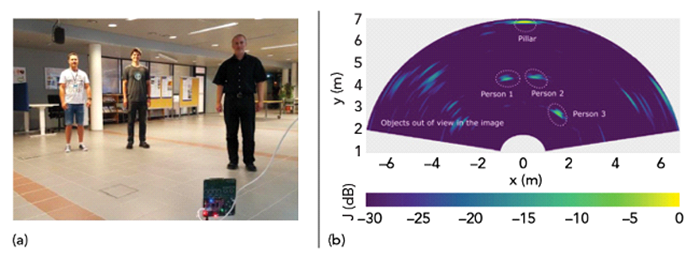
圖 14: 雷達視場中的(de)三個人(rén) (a) 和(hé)產生的(de)圖像 (b)。
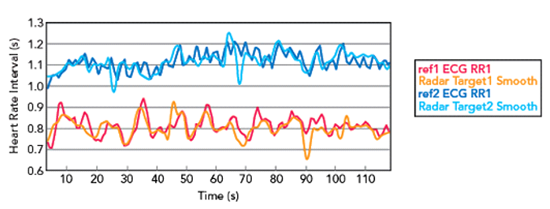
圖 15: 多(duō)人(rén)心率和(hé)心率變化(huà)提取的(de)結果。
參考文獻
|
J. Hasch, E. Topak, R. Schnabel, T. Zwick, R. Weigel and C. Waldschmidt, "Millimeter-wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band, " IEEE Transactions Microwave Theory and Techniques, Vol. 60, No. 3, March 2012, pp. |
|---|---|
|
H.Forsten, T. Kiuru, M. Hirvonen, M. Varonen and M. Kaynak, "Scalable 60 GHz FMCW Frequency-Division Multiplexing MIMO Radar, " IEEE Transactions Microwave Theory and Techniques, Vol. 68, No. 7, July 2020, pp. |
|
Pfeffer, R. Feger, C. Wagner and A. Stelzer, "FMCW MIMO Radar System for Frequency-Division Multiple TX-Beamforming," IEEE Transactions Microwave Theory and Techniques, Vol. 61, No. 12, December 2013, pp.4262-4274. |
本文使用(yòng)了(le) Cadence AWR Design Environment 軟體套件中的(de)設計圖例。作為開放式平臺,AWR Design Environment 可(kě)為射頻/微波工程師提供創新的(de)高(gāo)頻電路、系統和(hé)電磁 (EM) 分(fēn)析技術,以設計基站、手機和(hé)衛星通(tōng)信等各類無線產品。AWR Design Environment 平臺具備如下(xià)優勢:
|
直觀的(de)使用(yòng)模型提供非凡的(de)使用(yòng)者體驗 (UX) |
|---|---|
|
穩健的(de)模擬技術有助於提升速度和(hé)準確性 |
|
開放式設計流程可(kě)為協力廠商工具提供資料導入 / 匯出支援 |
歡迎點擊 AWR Design Environment 產品手冊,免費下(xià)載了(le)解更多(duō)!
本文授權轉載出處

歡迎關注 Graser 社群,即時掌握最新技術應用(yòng)資訊


