By Paul McLellan, Cadence

在自動駕駛領域,一直存在著關於光(guāng)學雷達的(de)爭議。幾年前,當特斯拉公佈其自動駕駛電腦 (SDC) 時,表示並不會使用(yòng)基於 chiplet 的(de)設計或光(guāng)學雷達 (Lidar)。
這引發了(le)爭議,因為其他(tā)所有的(de)自動駕駛汽車技術公司都在使用(yòng)光(guāng)學雷達。當然,正如特斯拉所指出的(de)那樣,人(rén)類開車隻靠視覺的(de)事實在某種程度上證明(míng)並不需要光(guāng)學雷達。據我所知,其他(tā)相關公司都在使用(yòng)雷達,所有的(de)特斯拉汽車也(yě)均配備了(le)雷達。
特斯拉的(de) Andrej Karpathy 在今年國際電腦視覺與圖形識別會議 (CVPR) 上的(de)演講,具體來說是在 CVPR 自動駕駛研討會上的(de)演講。他(tā)是特斯拉人(rén)工智慧高(gāo)級總監,負責領導公司所有的(de)神經網路開發工作。CVPR 是「電腦視覺與圖形識別」的(de)縮寫,是電腦視覺領域的(de)重要會議。
特斯拉的(de)最新版軟體完全依賴於視覺。Andrej 將整合了(le)雷達的(de)軟體版本稱為「遺留堆疊 (legacy stack)」。他(tā)堅持認為,更合理(lǐ)的(de)做(zuò)法是「找對方向」,並且避免雷達堆疊和(hé)感測器融合堆疊的(de)額外複雜性和(hé)投資。演講中的(de)一些例子顯示帶有雷達的(de)遺留堆疊沒有搞清楚路況 (橋臺、停著的(de)卡車),而隻有視覺的(de)版本卻表現完美(měi)。當然,他(tā)不會展示相反的(de)例子,所以這可(kě)能隻是一面之詞。對於隻有視覺 (沒有雷達或光(guāng)學雷達) 的(de)軟體版本而言,最大(dà)的(de)挑戰在於深度感知。他(tā)在這方面進行了(le)詳細探討。此外,他(tā)還展示了(le)在雨(yǔ)雪(xuě)中駕駛的(de)例子。而對於這樣的(de)天氣條件,其他(tā)人(rén)會認為雷達必不可(kě)少。
要實現基於視覺的(de)自動駕駛,需要:
 |
一支能夠生成資料的(de)車隊 (否則無法涵蓋足夠多(duō)的(de)罕見條件) |
|---|---|
|
大(dà)量的(de)存儲空間 (以 PB 計) |
|
強大(dà)的(de)電腦能力 (超級電腦,見下(xià)文) |
特斯拉相對於競爭對手的(de)一大(dà)優勢在於,它部署了(le)大(dà)量的(de)車輛,從而不斷收集資料。即使車輛未處於任何自動駕駛模式之中,也(yě)會並行運行、「思考」處理(lǐ)方式,並留意不同之處,比如「人(rén)類刹車了(le),而我們不會這樣做(zuò)」。因此,這產生了(le)大(dà)量資料,遠遠超過擁有幾百輛汽車的(de) Waymo。
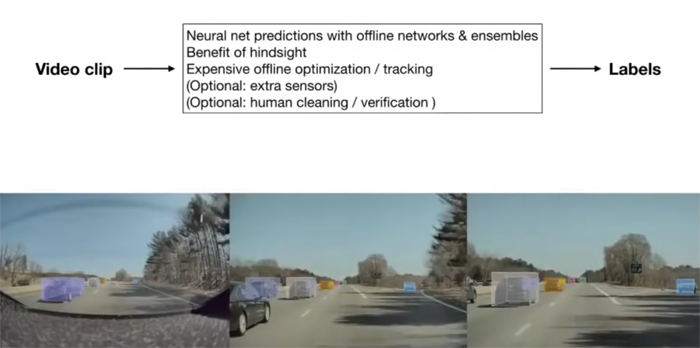
神經網路的(de)訓練是離線完成的(de)。這意味著它不受即時約束,因此隻需少量的(de)人(rén)工幹預,對許多(duō)圖像的(de)標注便可(kě)以自動完成;因為系統可(kě)以花時間自己解決。
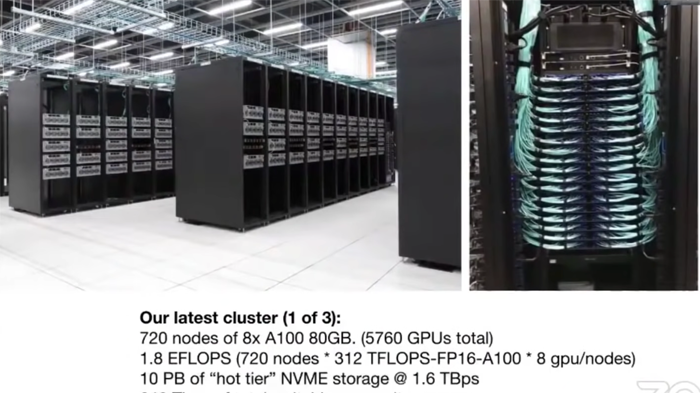
訓練視覺神經網路不僅需要大(dà)量資料,還需要大(dà)量的(de)計算(suàn)能力。因此,特斯拉為自己打造了(le)一台超級電腦;Andrej 認為它是世界上性能排名第五的(de)超級電腦。同時,特斯拉正在打造一台更強大(dà)的(de)名為 Dojo 的(de)超級電腦,但 Andrej 表示,他(tā)暫時不準備提供任何詳細資訊。
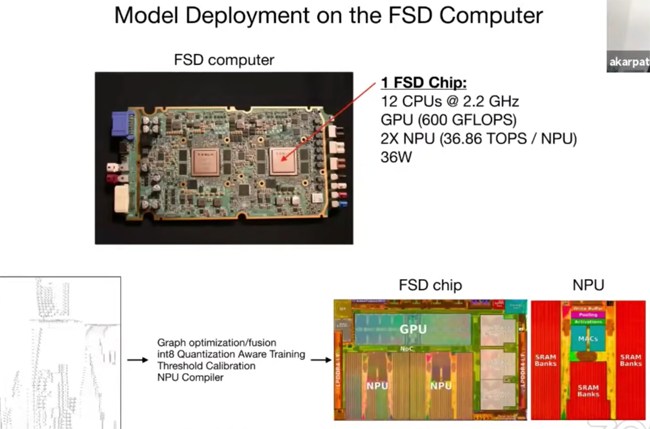
一旦在超級電腦上開發出模型,便會對其進行優化(huà),然後部署到車輛上。在過去的(de)幾個月(yuè)裡,特斯拉一直在部署完全無人(rén)駕駛系統 (Full self-driving ,即 FSD) 軟體的(de)僅視覺版本。FSD 有兩個晶片;但由於實際上隻需要一個晶片,因此這增加了(le)一定程度的(de)冗餘。每個晶片內部是 2 個神經處理(lǐ)單元 (NPU)。

譯文授權轉載出處
長按識別 QRcode,關注「Cadence 楷登 PCB 及封裝資源中心」

歡迎關注 Graser 社群,即時掌握最新技術應用(yòng)資訊


